极限,导数与泰勒展开
$\sin{30^\circ} = \frac{1}{2} $,$\cos{30^\circ} = \frac{\sqrt{3}}{2} $,$\tan{60^\circ} = \sqrt{3}$。由此我们自然地提出一个问题:给定任意值 $\theta$,我们能否知道其对应的 $\sin{\theta}$,$\cos{\theta}$ 和 $\tan{\theta}$ 分别等于几。
这里集中于正弦函数展开讨论。为了简便,下文均使用弧度制。首先,我们要定义什么是正弦函数。一个常见的定义是:$\sin{A} = \frac{\angle A \text{的对边}}{\text{斜边}} $,如果要将其推广到任意角,我们可以这样定义:设一单位圆,其半径为 $1$,圆心为一平面直角坐标系的原点。设一过原点的射线,其从 $x$ 开始旋转 $\theta$ 得到角 $\theta$,与圆交于一点 $(x,y)$,那么 $\sin\theta = \frac{y}{1} = y$。这里,$\theta$ 是有正负的,以逆时针为正方向。若 $\theta$ 的绝对值大于 $2\pi$,则继续旋转。所以,正弦函数是周期函数,符合 $\sin{\theta} = \sin({\theta + 2k\pi})$。
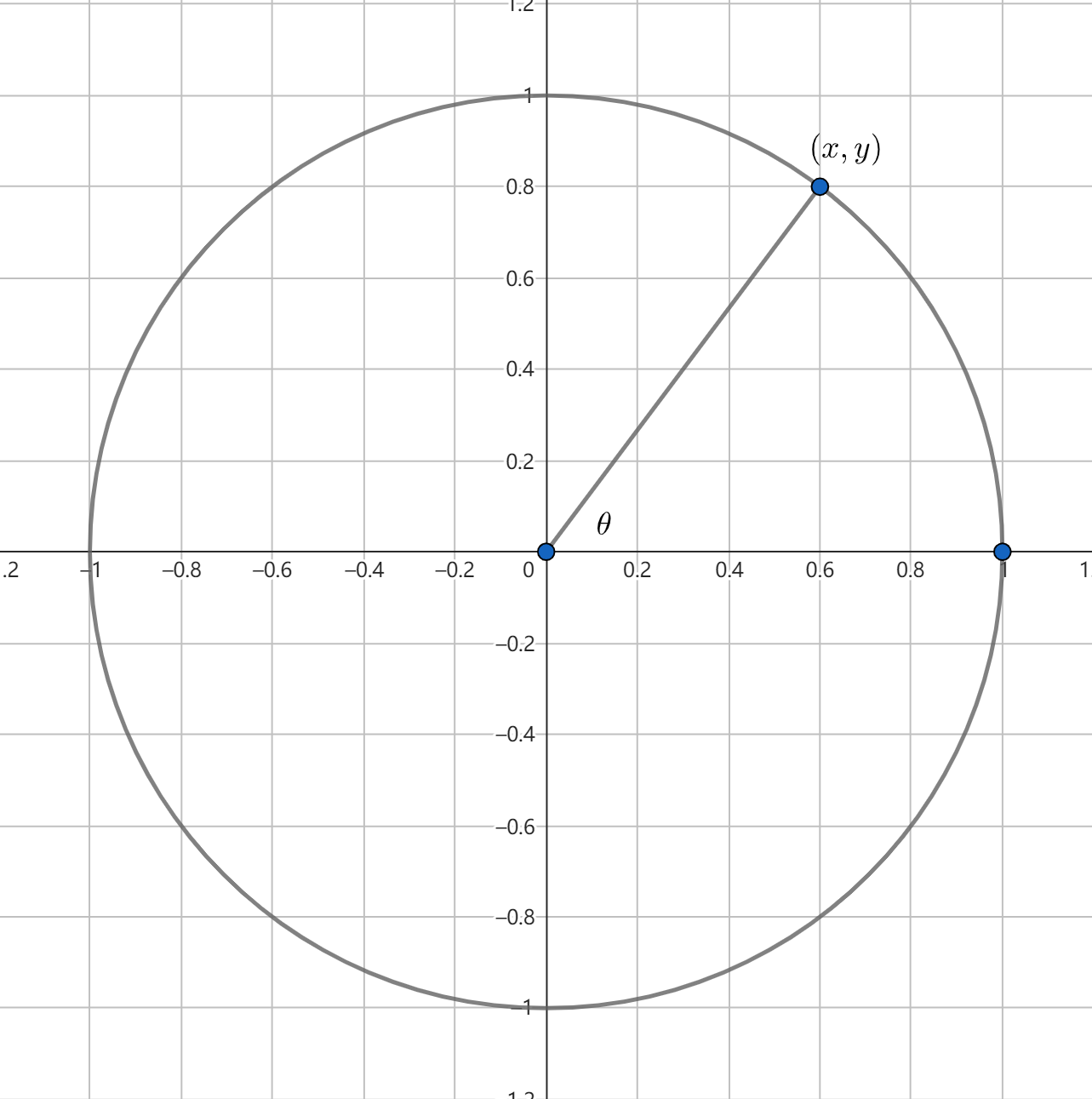
得到的函数图像为:

想求出这样一个函数的值是复杂的,如果像画一个三角形来测量,误差也太大了,还无法保证作图的精度。为了求出它的值,以下将从极限开始,给出 $\sin x$ 的泰勒展开式以及证明。
极限
$\varepsilon - \delta$ 语言
首次给出了极限的正式定义的是法国数学家柯西,他的定义是:当属于一个变量的相继的值无限地趋紧某个固定值时,如果最终同固定值之差可以随意的小,那么这个固定值就称为所有这些值的极限。在这里,极限不是一个固定的值,而是一个不断趋近的过程。但他使用了很多如“无限趋近”,“随意的小”这样的词汇,不够严格。真正现代的定义,由德国数学家魏尔斯特拉斯在柯西的基础上给出,表述如下:
设函数 $f(x)$ 在点 $a$ 的某个去心邻域内有定义。如果存在一个常数 $L$,使得对于任意给定的正数 $\varepsilon$,总存在正数 $\delta$,使得当 $0 \lt \vert x - a \vert \lt \delta $ 时,对应的函数值都满足不等式:$\vert f(x) - L \vert \lt \varepsilon$,那么常数 $L$ 就叫做函数 $f(x)$ 当 $x \to a$ 时的极限,即 $\lim_{x \to a} = L$。对极限做出正确的定义后,我们应抛弃前文的不严谨的导数计算过程了。
这就是极限的 $\varepsilon - \delta$ 语言。我们可以通过以下的例子理解它:
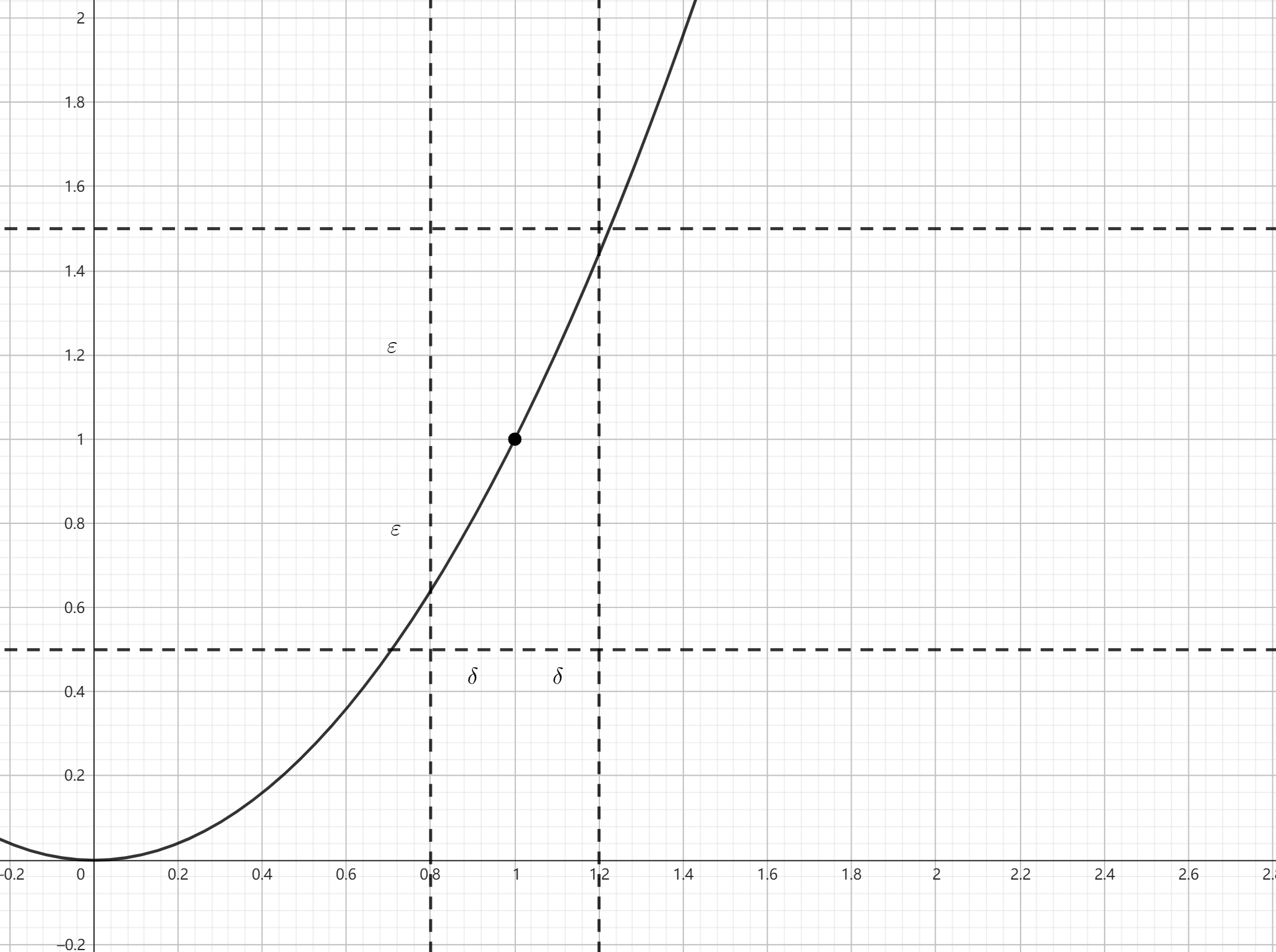
这里有函数 $f(x) = x^2$ 的图像,对 $\lim_{x \to 1}f(x) = 1$,解释是这样的。给定 $\varepsilon$,当 $0 \lt \vert x - 1 \vert \lt \delta $ 时,总可以找到 $\delta$ 满足不等式 $\vert f(x) - 1 \vert \lt \varepsilon$。证明如下。
对任意正数 $\varepsilon$,找正数 $\delta$,使当$0 \lt \vert x − 1 \vert \lt \delta$ 时,有$\vert x^2 - 1 \vert \lt \varepsilon$。分析这个式子,我们可以得到:
\[\vert x + 1\vert \cdot \vert x - 1\vert \lt \delta\]限制 $x$ 取值为 $\vert x - 1 \vert \lt 1$,即 $0 \lt x \lt 2$,同时有:
\[\vert x + 1\vert \lt \vert2 + 1\vert = 3\]因此:
\[\vert x^2 − 1\vert = \vert x − 1\vert \cdot \vert x + 1\vert \lt 3 \vert x − 1\vert\]我们希望 $\vert x^2 - 1 \vert \lt \varepsilon$,所以 $3 \vert x - 1 \vert \lt \varepsilon$,即 $\vert x - 1 \vert \lt \frac{\varepsilon}{3}$。同时还应该满足 $\vert x - 1 \vert \lt 1$,因此 $\delta$ 等于 $1$ 和 $\frac{\varepsilon}{3}$ 中的最小值,即 $\delta = \min{1,\frac{\varepsilon}{3}}$。故:
\[\vert x^2 - 1\vert = \vert x - 1\vert \cdot \vert x + 1\vert \lt \frac{\varepsilon}{3} \cdot 3 = \varepsilon\]这样,我们就证明了 $\lim_{x \to 1}f(x) = 1$。
极限的局部保号性
若 $\lim_{x \to x_0}f(x) = L$,且 $L \gt 0$(或 $L \lt 0$),则存在一个 $\delta \gt 0$,使得当 $x \in \mathring{U}(x_0,\delta)$时($x$ 位于以 $x_0$ 为中心、以 $\delta$ 为半径的去心邻域内),恒有 $f(x) \gt 0$(或 $f(x) \lt 0$)。我们可以使用 $\varepsilon - \delta$ 语言证明。
根据定义,对于任意 $\varepsilon \gt 0$,存在 $\delta \gt 0$,使得当 $0 \lt \vert x - x_0 \vert \lt \delta$ 时,有 $\vert f(x) - L \vert \lt \varepsilon$。为了确保函数 $f(x)$ 的值在 $x_0$ 附近不变号,我们需要选取合适的 $\varepsilon$,设 $\varepsilon = \frac{\vert L \vert}{2} \gt 0$,那么存在 $\delta$ 使 $\vert f(x) - L\vert \lt \frac{\vert L \vert}{2}$。拆绝对值号,得到:
\[-\frac{\vert L \vert}{2} \lt f(x) - L \lt \frac{\vert L \vert}{2}\]两边同加 $L$,得:
\[L - \frac{\vert L \vert}{2} \lt f(x) \lt L + \frac{\vert L \vert}{2}\]当 $L \gt 0$ 时,有:
\[\frac{\vert L \vert}{2} \lt f(x)\]故当 $L \gt 0$ 时,$f(x) \gt 0$。
当 $L \lt 0$ 时,有:
\[f(x) \lt -\frac{\vert L \vert}{2}\]故当 $L \lt 0$ 时,$f(x) \lt 0$。
我们便证明了极限的局部保号性。通过构建真值表,我们知道,原命题与其逆否命题等价,故下述命题为真:
对于任意 $\delta \gt 0$,极限 $\lim_{x \to x_0}f(x)$ 存在时,总存在某点 $x \in \mathring{U}(x_0,\delta)$ 使 $f(x) \leq 0$(或 $f(x) \geq 0$),则极限值 $L \leq 0$(或 $L \geq 0$)。
同样,我们可以直接利用反证法证明此命题。
当 $f(x) \leq 0$ 时,我们设 $L \gt 0$。那么,因为 $\lim_{x \to x_0}f(x) = L \gt 0$,必存在 $\delta \gt 0$,使 $x \in \mathring{U}(x_0,\delta)$ 时,有 $f(x) > 0$。但是,$f(x) \leq 0$,存在矛盾,故 $L \gt 0$ 为假,而命题为真。$f(x) \geq 0$ 时的证明类似。
我们定义清楚极限,便可以严谨点定义数学中另一个重要的概念——导数了。
导数
导数的计算
导函数是描述原函数变化率的函数,而一函数在某点的导数描述在这一点附近函数的变化率。导数的几何意义是,函数在某点切线的斜率,求导,也就是求其 $y$ 轴上变化量与 $x$ 轴上变化量的比值。
在现代,导数的定义式是这样的:
\[\frac{\mathrm{d}f}{\mathrm{d}x} = \lim_{h \to 0} \frac{f(x+h)-f(x)}{h}\]$\frac{\mathrm{d}f}{\mathrm{d}x}$ 是莱布尼兹的记法,表示函数 $f(x)$ 的导数,若用拉格朗日的记法,便是 $f’(x)$。
下面以 $f (x) = x^2$ 为例,来演示如何求导。我们可以求此函数在 $x = 2$ 时的导数:
\[\frac{(2 + h)^{2} - 2^2}{h} = \frac{h^{2} + 4h}{h} = 4 + h = 4\]对这个过程更通俗的解释是,想象对 $x$ 增加一变化量 $h$ ,它应该是一个很小的量,$\lim_{h \to 0}$,这个式子的含义将在下文解释。这时,函数的值为 $(2 + h)^2$,再减去 $2^2$,即为函数值的变化量,比上 $h$,就是此函数在 $x = 2$ 时的变化率,即导数了。
在计算的最后,我们取 $h$ 的极限 $0$。将 $2$ 替换为 $x$,我们可以得到 $f(x) = x^2$ 的导函数为:
\(\frac{\mathrm{d}f}{\mathrm{d}x} = \frac{(x + h)^{2} - x^2}{h} = \frac{h^{2} + 2xh}{h} = 2x + h = 2x\) 我们再对 $x^3$ 求导:
\[\frac{\mathrm{d}}{\mathrm{d}x} \left( x^{3} \right) = \frac{(x + h)^{3} - x^3}{h} = \frac{3x^{2}h}{h} = 3x^2\]不难发现规律:
\[\frac{\mathrm{d}}{\mathrm{d}x} \left( x^{n} \right) = nx^{n - 1}\]容易证明:
\[\frac{\mathrm{d}}{\mathrm{d}x} \left( x^{n} \right) = \frac{ \left(x + h \right)^{n} - x^n}{h} = \frac{x^n + nx^{n-1}h - x^n}{h} = nx^{n-1}\]因为求导时分母会是 $h$,为了方便,我们可以直接将为 $h^2$ 倍数的项忽略。事实上,$n$ 可以取任意实数,甚至复数。但我们只证明了 $n \in \mathbb{N}$ 时,公式的正确性,不过这对我们来说足够了。
尝试对函数 $s(x) = f(x) + g(x)$ 求导:
\[\frac{\mathrm{d}s}{\mathrm{d}x} = \frac{s(x + h) - s(x)}{h} = \frac{f(x + h) + g(x + h) - f(x) - g(x)}{h} = \frac{f(x + h) - f(x)}{h} + \frac{g(x + h) - g(x)}{h} = \frac{\mathrm{d}f}{\mathrm{d}x} + \frac{\mathrm{d}g}{\mathrm{d}x}\]尝试对函数 $f(x)g(x)$ 求导:
\[\frac{\mathrm{d}}{\mathrm{d}x}f(x)g(x) = \frac{f(x + h)g(x + h) - f(x)g(x)}{h}\]在分子上添加 $f(x)g(x + h) - f(x)g(x + h)$ 得:
\[\frac{\mathrm{d}}{\mathrm{d}x}f(x)g(x) = \frac{f(x + h) - f(x)}{h}g(x + h) + \frac{g(x + h) - g(x)}{h}f(x)\]即:
\[\frac{\mathrm{d}}{\mathrm{d}x}f(x)g(x) = \frac{\mathrm{d}f}{\mathrm{d}x}g(x) + \frac{\mathrm{d}g}{\mathrm{d}x}f(x)\]这就是乘积法则。
尝试对函数 $f(g(x))$ 求导。设 $x$ 增加 $\mathrm{d}x$,那么 $g(x)$ 增加 $\mathrm{d}g$,$f(g(x))$ 的在 $y$ 轴上的变化量就是它的导数乘它在 $x$ 轴上的变化量,即:
\[\mathrm{d}f = \frac{\mathrm{d}f}{\mathrm{d}g} \cdot \mathrm{d}g\]而 $\mathrm{d}g$ 为:
\[\mathrm{d}g = \frac{\mathrm{d}g}{\mathrm{d}x} \cdot \mathrm{d}x\]代入,得:
\[\mathrm{d}f = \frac{\mathrm{d}f}{\mathrm{d}g} \cdot \frac{\mathrm{d}g}{\mathrm{d}x} \cdot \mathrm{d}x\]即:
\[\frac{\mathrm{d}}{\mathrm{d}x}f(g(x)) = \frac{\mathrm{d}f}{\mathrm{d}x} = \frac{\mathrm{d}f}{\mathrm{d}g} \cdot \frac{\mathrm{d}g}{\mathrm{d}x}\]这就是链式法则,若要$f(g(x))$ 的导数,先将 $g(x)$ 作为变量,对 $f(x)$ 求导,再将其与 $g(x)$ 的导数相乘。
可以尝试对 $\sin {x}$ 求导,按刚才的经验,列出式子:
\[\frac{\mathrm{d}}{\mathrm{d}x} \left( \sin {x} \right) = \frac{ \sin {\left(x + h \right)} - \sin {x}}{h}\]这可以用和角公式计算,但我们还能从正弦函数的定义来入手,用几何来求导。
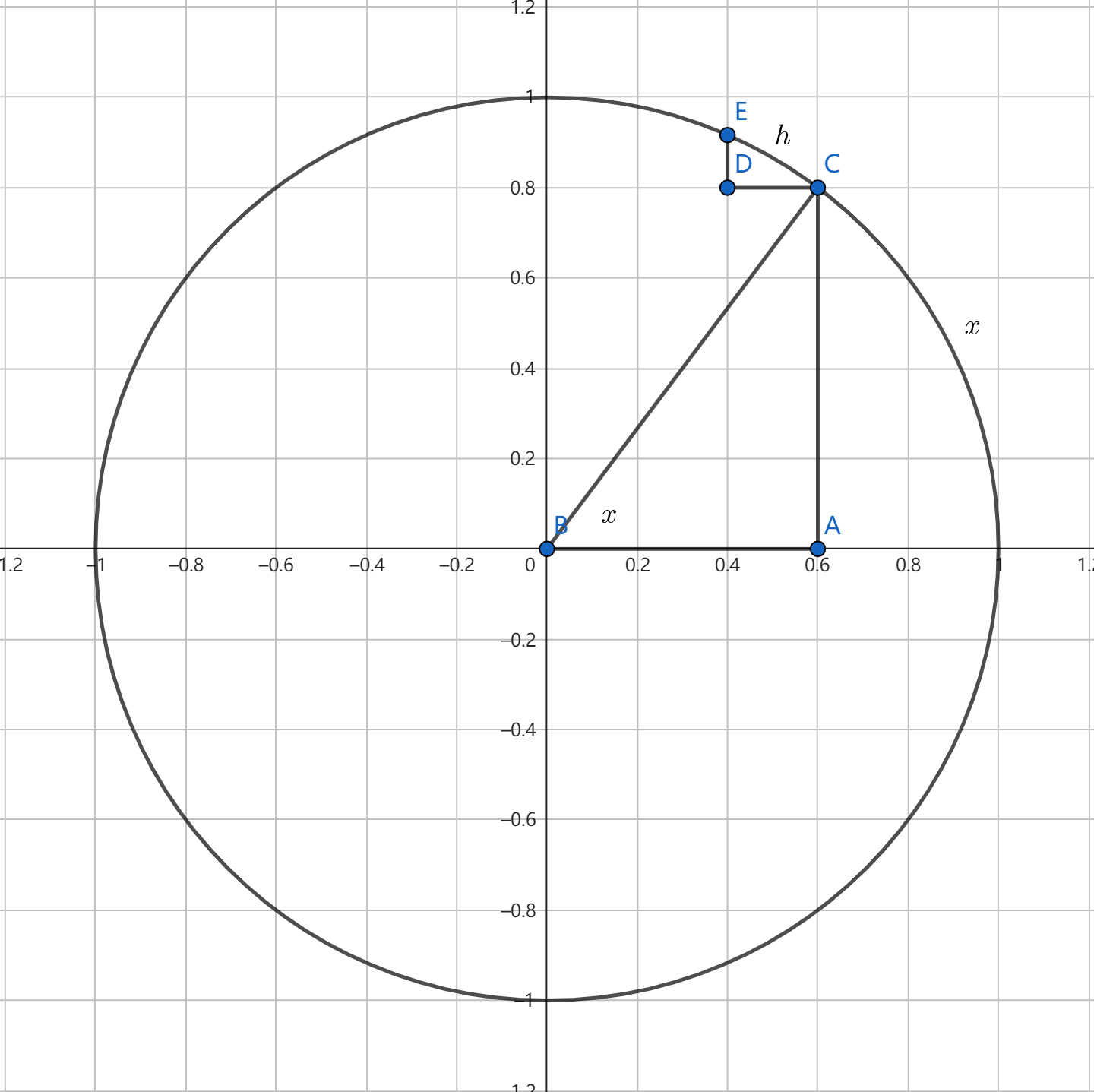
因为 $h$ 趋近于 $0$,$CE$ 可被看成直线,$\triangle{ABC} \sim \triangle{DEC}$ ,$EC = h$,故 $ED = \mathrm{d}\sin{x}$。这里,$h$ 表示在 $x$ 轴上的变化量,$\mathrm{d}\sin{x}$ 表示因 $x$ 的变化而变化的量,故:
\[\frac{\mathrm{d}}{\mathrm{d}x} \left( \sin {x} \right) = \frac{ \sin {\left(x + h \right)} - \sin {x}}{h} = \frac{\mathrm{d}\sin{x}}{dx} = \cos{\angle{DEC}} = \cos{x}\]同理可得,$\cos{x}$ 的导数是 $-\sin{x}$。
常数 $c$ 的导数是 $0$,$cx$ 的导数是 $c$。同理,常数 $cf(x)$ 的导数等于 $c \cdot \frac{\mathrm{d}f}{\mathrm{d}x}$。这一性质很容易证明。 函数导数的导数被称作二阶导数,同理,我们有高阶导数。$x^2$ 的二阶导数为:
\[\frac{\mathrm{d}^2}{\mathrm{d}x^2}(x^2) = \frac{\mathrm{d}}{\mathrm{d}x}(2x) = 2\]导数的应用
我们定义路程函数 $s(t)$,对其求导,我们可以得到:
\[\frac{\mathrm{d}}{\mathrm{d}t}s(t) = \frac{s(t + h) - s(t)}{h} = \frac{\mathrm{d}s}{\mathrm{d}t} = v(t)\]路程函数的导函数是速度函数,其在某点的导数值便是瞬时速度。求路程函数的二阶导数,即速度函数的导数:
\[\frac{\mathrm{d}}{\mathrm{d}t}v(t) = \frac{\mathrm{d}v}{\mathrm{d}t} = a(t)\]就是加速度。
牛顿发明微积分时,并没有对极限做出严格的定义,便出现了 $h$ 是不是零的争论。早期微积分理论并不能做出合理的解答,而牛顿的尝试也以失败告终。这使贝克莱批判到,$\mathrm{d}x$ 就像是一个“已死量的幽灵”,指责微积分是“分明的诡辩”,求导的行为就是“依靠双重的错误得到了虽然不科学却是正确的结果”;罗尔也嘲讽微积分是“巧妙的谬论的汇集”。虽然贝克莱批判的初衷是维护神学,但他恰如其分地指出了当时微积分的缺陷,这样的批评还是值得肯定的。而这些关于微积分的讨论,引发了第二次数学危机。而在今天,我们只需站在巨人们的肩膀上学习。
泰勒展开
费马引理
如果函数 $f(x)$ 在点 $x_0$ 处可导,且当 $x \in \mathring{U}(x_0,\delta)$ 时恒有 $f(x) \leq f(x_0)$ 或 $f(x) \geq f(x_0)$(即 $x_0$ 是一个局部极大值点或局部极小值点),那么函数在该点的导数必为零。即:
\[f'(x_0) = 0\]我们将以局部极大值点为例证明,局部极小值点的证明类似。
首先,计算 $f(x)$ 的右导数,据极限的保号性,有:
\[f'_+(x) = \lim_{h \to 0^+} = \frac{f(x + h) - f(x)}{h} \leq 0\]同理,因为 $\lim_{h \to 0^-}$ 为负,有:
\[f'_-(x) = \lim_{h \to 0^-} = \frac{f(x + h) - f(x)}{h} \geq 0\]因为函数 $f(x)$ 在 $x_0$ 处可导,其左导数和右导数相等。结合上述推论得到,符合条件的,只有:
\[f'(x) = 0\]费马引理证毕。
微分三大中值定理
罗尔中值定理
如果函数 $f(x)$ 在闭区间 $[a,b]$ 上连续,在开区间 $(a,b)$ 内可导,且 $f(a) = f(b)$,那么至少存在一点 $\xi \in (a,b)$,使得 $f’(\xi) = 0$。
如果函数 $f(x)$ 在 $[a,b]$ 内是常数,任意一点均可作为 $\xi$,定理显然成立。
在更一般的情况中,根据极值定理,在区间 $[a,b]$ 内,必能取到最大值 $M$ 和最小值 $m$。极值定理的证明需要一些数学分析知识,在此不做证明。因为$f(x)$ 不是常数函数,且 $f(a) = f(b)$,故最大值和最小值至少有一个不在端点上。设 $\xi \in (a,b)$ 且 $f(\xi) = M$,根据费马引理,有:
\[f'(\xi) = 0\]$f(\xi) = m$ 同理。
拉格朗日中值定理
如果函数 $f(x)$ 在闭区间 $[a,b]$ 上连续,在开区间 $(a,b)$ 内可导,则在 $(a,b)$ 内至少存在一点 $\xi$,使得:
\[f'(\xi) = \frac{f(b) - f(a)}{b - a}\]首先构造辅助函数1:
\[g(x) = f(x) - \frac{f(b) - f(a)}{b - a}(x - a)\]显然,这个函数连续且可导。计算 $g(a)$,得到:
\[g(a) = f(a)\]计算 $g(b)$ 得到:
\[g(b) = f(b) - f(b) + f(a)\]$g(a) = g(b)$,可以应用罗尔中值定理,得到:
\[g'(\xi) = f'(\xi) - \frac{f(b) - f(a)}{b - a} = 0\]即:
\[f'(\xi) = \frac{f(b) - f(a)}{b - a}\]柯西中值定理
若函数 $f(x)$ 与 $g(x)$ 在闭区间 $[a,b]$ 内连续,在开区间 $(a,b)$ 内可导,对任意 $x \in (a,b)$,有 $g’(x) \neq 0$,存在 $\xi \in (a,b)$,使得:
\[\frac{f(b) - f(a)}{g(b) - g(a)} = \frac{f'(\xi)}{g'(\xi)}\]首先,若 $g(a) = g(b)$,由罗尔中值定理知,有$g’(\xi) = 0$。但 $g’(x) \neq 0$,故 $g(a) \neq g(b)$。
构造辅助函数2:
\[h(x) = [f(b)−f(a)]g(x) − [g(b)−g(a)]f(x)\]由于 $f(x)$ 和 $g(x)$ 在指定区间内连续,可导,故 $h(x)$ 连续,可导。
当 $x = a$ 时有:
\[h(a) = [f(b)−f(a)]g(a) − [g(b)−g(a)]f(a) = g(a)f(b) - g(b)f(a)\]当 $x = b$ 时有:
\[h(b) = [f(b)−f(a)]g(b) − [g(b)−g(a)]f(b) = g(a)f(b) - g(b)f(a)\]故 $h(a) = h(b)$。由罗尔中值定理可知:
\[h'(\xi) = [f(b)−f(a)]g'(\xi) − [g(b)−g(a)]f'(\xi) = 0\]即:
\[\frac{f(b) - f(a)}{g(b) - g(a)} = \frac{f'(\xi)}{g'(\xi)}\]泰勒展开的证明
多项式易于计算和求导,我们可以用多项式函数 $T(x)$ 来近似另一函数 $f(x)$,我们要求在 $x = a$ 处函数的值相等,即:
\[T(x) = f(a)\]接着,使它们导数的值在 $x = a$ 处相等。我们使用函数:
\[T(x) = f(a) + C_1(x - a)\]这样能保证,$x = a$ 时,函数的值不受新增项影响。求得:
\[T'(x) = C_1 = f'(a)\]故:
\[T(x) = f(a) + f'(a)(x - a)\]然后对以下函数求二阶导数:
\[T(x) = f(a) + f'(a)(x - a) + C_2(x - a)^2\]得:
\[T^{(2)}(x) = 2C_2 = f^{(2)}\]即:
\[C_2 = \frac{f^{(2)}}{2}\]代入得:
\[T(x) = f(a) + f'(a)(x - a) + \frac{f^{(2)}}{2}(x - a)^2\]有规律如下:
\[f(x) = \sum_{k = 0}^{n} \frac{f^{(k)}(a)}{k!}(x - a)^k + R_n(x)\]通过这个规律,我们可以方便地写出 $n$ 阶泰勒多项式。其与原函数必定有误差,余项 $R_nx$ 就是误差的大小。当 $a = 0$ 时,泰勒公式又被称作麦克劳林公式。
以下将使用柯西中值定理证明泰勒公式。
余项的定义式为:
\[R_n(x) = T(x) - \sum_{k = 0}^{n} \frac{f^{(k)}(a)}{k!}(x - a)^k\]为了估计余项 $R_n(x)$,我们希望通过柯西中值定理将其与某个函数的高阶导数联系起来。一个巧妙的构造是定义以下两个关于 $t \in [a,x]$(或 $[x,a]$,取决于 $a$ 和 $x$ 的大小)的辅助函数3:
\[F(t) = f(x) - \sum_{k = 0}^{n} \frac{f^{(k)}(t)}{k!}(x - t)^k\] \[G(t)=(x − t)^{n + 1}\]当 $t = a$ 时,$F(a) = R_n(x)$,$G(a) = (x - a)^{(n + 1)}$;当 $t = x$ 时,$F(a) = 0$,$G(a) = 0$。 计算 $F’(t)$,根据乘积法则,大部分项都会抵消,得到:
\[F'(t) = -\frac{f^{(n + 1)}(t)}{n!}(x - t)^n\]函数 $F(t)$ 和 $G(t)$ 连续,可导,且 $G’(x) \neq 0$,应用柯西中值定理得:
\[\frac{F(x) - F(a)}{G(x) - G(a)} = \frac{F'(\xi)}{G'(\xi)}\]即:
\[\frac{0 - R_n(x)}{0 - (x - a)^{(n + 1)}} = \frac{-\frac{f^{(n + 1)}(\xi)}{n!}(x - \xi)^n}{-(n + 1)(x - \xi)^n}\]化简得:
\[R_n(x) = \frac{f^{(n + 1)}(\xi)}{(n + 1)!}(x - a)^{n + 1}\]这就是拉格朗日余项。代入余项定义式得:
\[f(x) = \sum_{k = 0}^{n} \frac{f^{(k)}(a)}{k!}(x - a)^k + \frac{f^{(n + 1)}(\xi)}{(n + 1)!}(x - a)^{n + 1}\]我们就成功证明了带拉格朗日余项的泰勒公式。
正弦函数的泰勒展开式
这里,使 $x_0 = 0$,代入公式,容易得到:
\[f(x) = x - \frac{x^3}{3!} + \frac{x^5}{5!} - \frac{x^7}{7!} + \cdots\]这就是 $\sin{x}$ 的泰勒多项式。
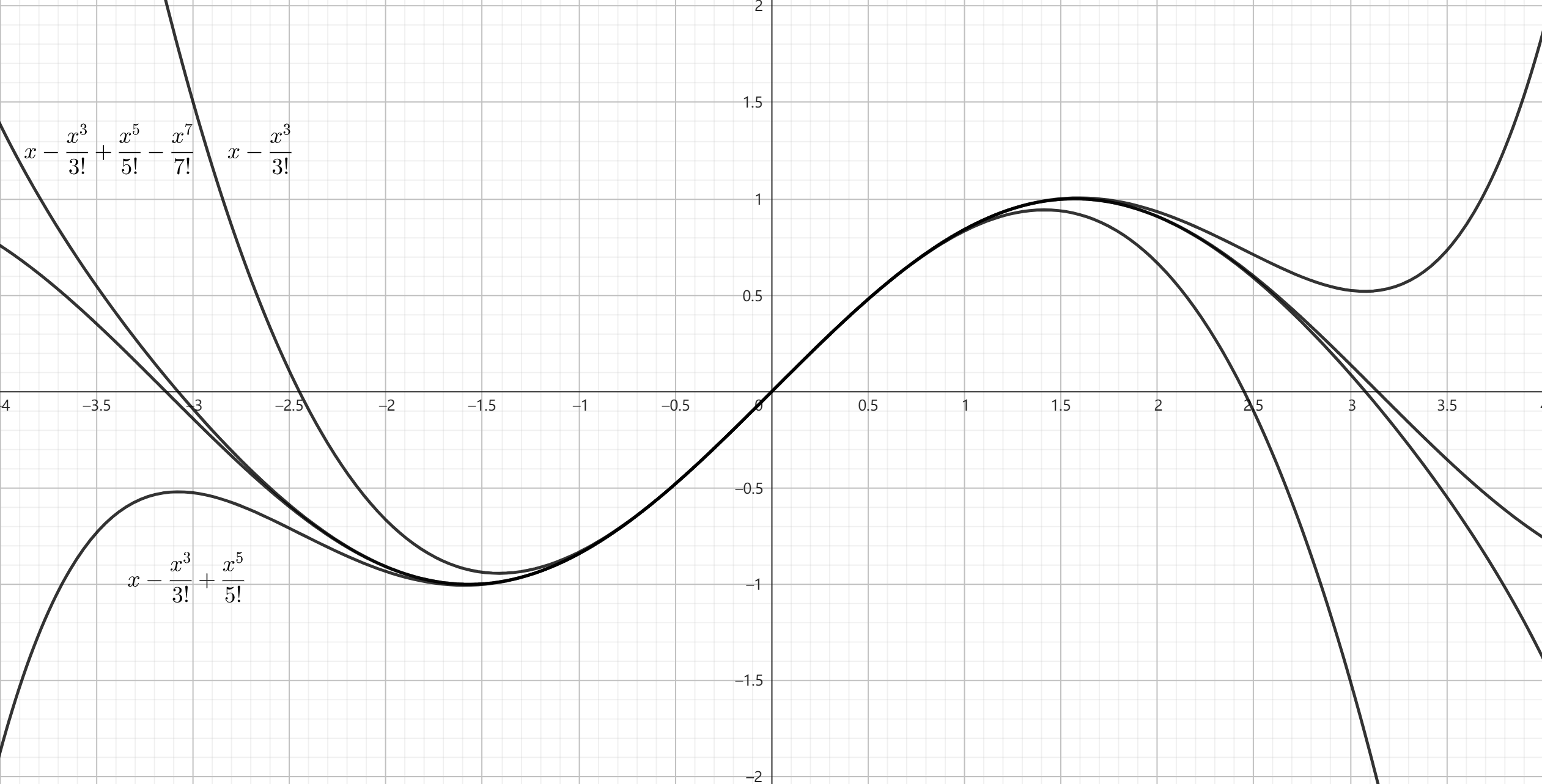
我们取到 $\sin{x}$ 的 $13$ 阶泰勒多项式就可以在 $[-\pi,\pi]$ 的闭区间内取得较好的近似效果,我们可以用拉格朗日余项进行误差分析。$\vert\sin^k \xi \vert \leq 1$,$a = 0$。代入拉格朗日余项得:
\[\frac{f^{(n + 1)}(\xi)}{(n + 1)!}(x - a)^{n + 1} = \frac{1}{(13 + 1)!}(\pi)^{13 + 1} \approx 0.000104638\]误差是很小的,而这正涵盖了正弦函数的一个周期。由于对于任意固定的 $x$,当 $\lim_{n \to \infty}$ 时,拉格朗日余项 $\lim_{R_n(x) \to 0}$,因此我们可以得出结论:正弦函数 sin x 的泰勒级数在其整个收敛域 $(-\infty, +\infty)$ 上收敛于 $\sin x$ 本身。更进一步,因为其函数图像的对称,我们只需要让 $\sin{x}$ 泰勒多项式在 $[0,\frac{\pi}{2}]$ 的闭区间内近似于它自身即可。
-
根据点斜式(已知直线上一点 $(x_0,y_0)$ 并且存在直线的斜率 $k$,则直线可表示为 $y - y_0 = k(x - x_0)$)知,过函数 $f(x)$ 两端点的弦的公式为 $y − f(a) = \frac{f(b) − f(a)}{b − a}(x − a)$,即 $y = f(a) + \frac{f(b) − f(a)}{b − a}(x − a)$。令 $g(x) = f(x) - f(a) - \frac{f(b) − f(a)}{b − a}(x − a)$,就能保证其两端的值均为 $0$,或者为了简洁,去掉 $-f(a)$ 项,其两端的值均为 $f(a)$,符合罗尔中值定理的条件。 ↩︎
-
柯西中值定理的结论可被改写为 $[f(b) − f(a)]g’(\xi) − [g(b) − g(a)]f’(\xi) = 0$。我们想构造函数 $h(x)$ 满足罗尔定理的条件,且满足 $h’(x) = [f(b)−f(a)]g’(x) − [g(b)−g(a)]f’(x)$。 ↩︎
-
注意到当 $t = a$ 时,$F(a) = f(x) - \sum_{k=0}^{n} \frac{f^{(k)}(a)}{k!}(x - a)^k = R_n(x)$,这正是我们要研究的余项。当 $t = x$ 时,$F(x) = f(x) - f(x) = 0$,且 $G(x) = 0$。因应用柯西中值定理的需要,我们让分母 $G(x) − G(a)$ 产生目标余项中的 $(x−a)^{n+1}$ 项。令 $G(x) = 0$,$G(a) = (x − a)^{n+1}$,则 $G(x) − G(a) = −(x − a)^{n+1}$。而且这样设计 $G(t)$ 是因为它的导数 $G’(t) = -(n+1)(x-t)^n$,能与 $F’(t)$ 中的因子 $(x-t)^n$ 相消。 ↩︎